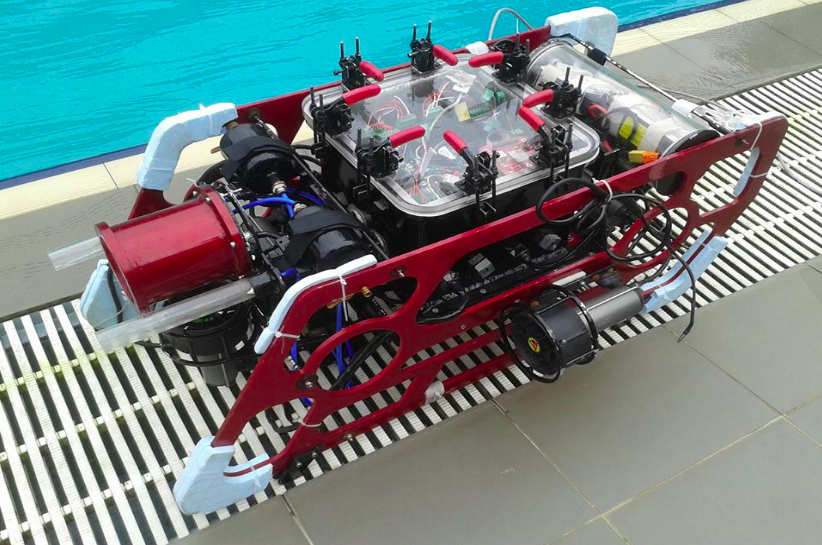
Matsya 1 was the very first AUV designed by the team back in 2011, with a goal to develop a state of the art AUV that could localize itself in an underwater environment and complete some predefined real life tasks for the Robosub 2012 competition.
| Specifications | Vehicle Details |
|---|---|
| DoF | 5 (Roll, Pitch, Yaw, Surge, Heave) |
| Weight | 20 kgs |
| Dimensions | 1000mm x 531mm x 337mm |
| Endurance | 60 Minutes |
| Depth Rating | 40 feet |
| Pressure Vessels | One Hull for Electronics, Batteries and Camera. |
| Actuation System | Assembly of Five thrusters |
| Power | Lithium Polymer Batteries |
| Feedback Control | Visual, Inertial, Pressure. |
The vehicle can operate at a maximum velocity of 0.6m/s and weighs only 20kgs which made it the lightest vehicle to participate in Robosub 2012.
The final part of the electronics division are the sensors and actuators which consist of Pressure Sensor, Attitude Heading Reference System (AHRS), Cameras, Current Sensors, Actuators and driver.
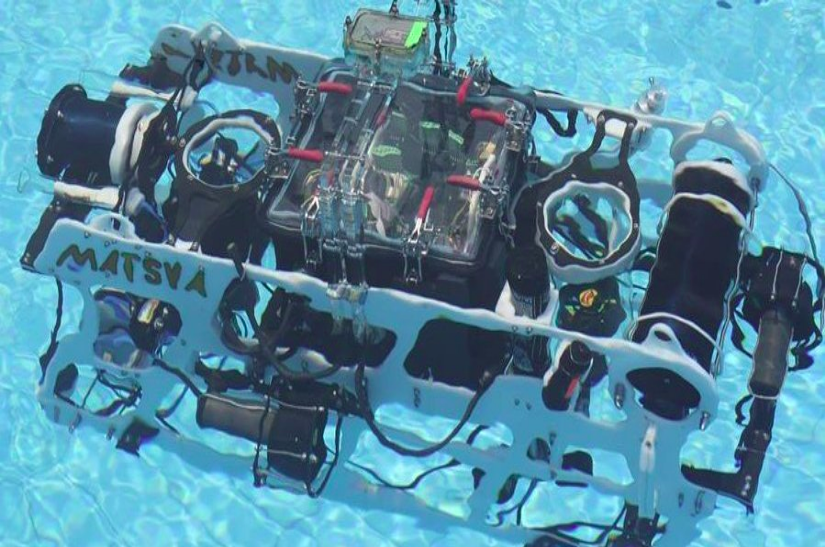
The second iteration of Matsya is complete and more modular than its predecessor, with separate enclosures for electronics, batteries, cameras, and torpedo shooting actuators. The design aimed to ensure robust waterproofing, ease of assembly, and efficient heat sinking.
| Specifications | Vehicle Details |
|---|---|
| DoF | 5 (Roll, Pitch, Yaw, Surge, Heave) |
| Weight | 24 kgs |
| Dimensions | 930mm x 410mm x 650mm |
| Endurance | 90 Minutes |
| Depth Rating | 100 feet |
| Pressure Vessels | Separate hulls for Electronics, Batteries, Camera and Hydrophones. |
| Actuation System | Assembly of Six thrusters, Markers |
| Power | Lithium Polymer Batteries |
| Feedback Control | Visual, Inertial, Pressure |
The vehicle has a gripper, marker dropper, and torpedo shooter, all of which are actuated pneumatically.
Matsya 3 was the third vehicle built by the team in 2013. Matsya-3 has a modular design and weighs 42 kg. It is highly optimised for strength and buoyancy.
| Specifications | Vehicle Details |
|---|---|
| DoF | 5 (Roll, Pitch, Yaw, Surge, Heave) |
| Weight | 44 kgs |
| Dimensions | NA |
| Endurance | 120 Minutes |
| Depth Rating | 150 feet |
| Pressure Vessels | Separate hulls for Electronics, Batteries, IMU and Cameras. |
| Actuation System | Assembly of Six thrusters, Markers and Torpedos. |
| Power | Lithium Polymer Batteries |
| Feedback Control | Visual, Inertial, Pressure and Acoustic |
Matsya 4 is the fourth AUV in the Matsya series. Although it has a similar design philosophy to Matsya 3, it has majorly improved in terms of weight optimization, reliability, endurance, speed, aesthetics, and cognition.
| Specifications | Vehicle Details |
|---|---|
| DoF | 5 (Sway, Pitch, Yaw, Surge, Heave) |
| Weight | 41.4 kgs |
| Dimensions | 1070mm x 770mm x 550mm |
| Endurance | 240 Minutes |
| Depth Rating | 150 feet |
| Pressure Vessels | Separate hulls for Electronics, Batteries, Cameras, IMU and DVL. |
| Actuation System | Assembly of eight thrusters, Markers, Gripper and Torpedos |
| Power | Lithium Polymer Batteries |
| Feedback Control | Visual, Inertial, Pressure, DVL and Acoustic |
Matsya 5 is the fifth AUV in the Matsya series. To permit easier access to the components of the vehicle, the surface was split into 6 parts, each of which was detachable.
| Specifications | Vehicle Details |
|---|---|
| DoF | 6 (Roll, Pitch, Yaw, Surge, Sway, Heave) |
| Weight | 47 kgs |
| Dimensions | 1750mm x 780mm x 640mm |
| Endurance | 240 Minutes |
| Depth Rating | 150 feet |
| Pressure Vessels | Separate hulls for Electronics, Batteries, Cameras, IMU and DVL. |
| Actuation System | Assembly of eight thrusters, Markers, Gripper and Torpedos |
| Power | Lithium Polymer Batteries |
| Feedback Control | Visual, Inertial, Pressure, DVL and Acoustic |
The sixth variant of Matsya saw major design changes to address pressing issues such as heating leading to multiple electrical failures and reducing the size of the vehicle in general for better control.
| Specifications | Vehicle Details |
|---|---|
| DoF | 6 (Roll, Pitch, Yaw, Surge, Sway, Heave) |
| Weight | 37 kgs |
| Dimensions | 1051mm x 442mm x 609mm |
| Endurance | 240 Minutes |
| Depth Rating | 150 feet |
| Pressure Vessels | Separate hulls for Electronics, Batteries, Cameras, IMU and DVL. |
| Actuation System | Assembly of eight thrusters, Markers, Gripper and Torpedos |
| Power | Lithium Polymer Batteries |
| Feedback Control | Visual, Inertial, Pressure, DVL and Acoustic |